6媟嶌嬈堏摦儘儃僢僩
嵭奞尰応偱偺儗僗僉儏乕妶摦丆嫶傗僩儞僱儖偺揰専曐庣側偳丆壆奜嶌嬈偵梡偄傜傟傞儘儃僢僩偼丆侾戜偱崅偄堏摦擻椡偲嶌嬈擻椡傪偁傢偣帩偮昁梫偑偁傝傑偡丏 杮尋媶偱偼丆崅懍埨掕側堏摦傪峴偆6媟儌乕僪丆掅強偱偺榬嶌嬈偑壜擻側悈暯4媟2榬儌乕僪丆崅強偱偺榬嶌嬈偑壜擻側悅捈4媟2榬儌乕僪傪愗傝懼偊傞偙偲偱丆崅偄嶌嬈堏摦擻椡傪敪婗偡傞6媟儘儃僢僩傪奐敪偟偰偄傑偡丏
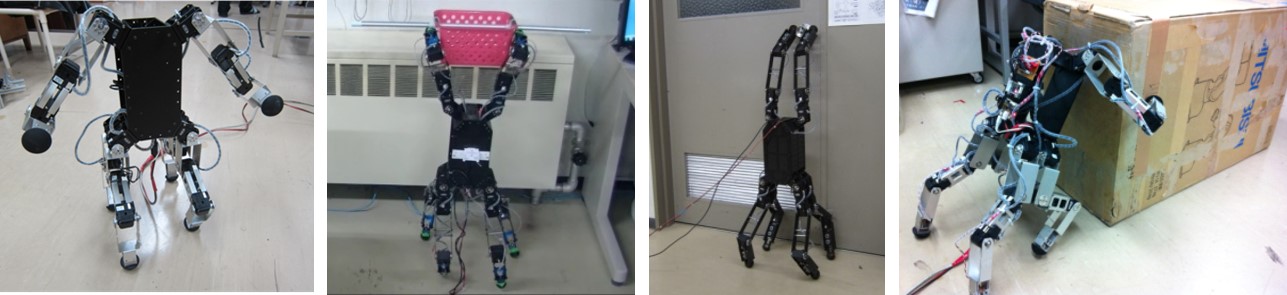
仭崅懍埨掕側堏摦傪峴偆6媟儌乕僪
6杮偺媟偡傋偰傪偦偺傑傑媟偲偟偰梡偄傑偡丏
慡曽岦僩儔僀億僢僪曕梕偵傛傝丆崅懍埨掕側堏摦偑壜擻偱偡丏
晄惍抧傗愥忋偺堏摦丆抜嵎忔傝墇偊丆奒抜徃崀摍傪幚尰偟偰偄傑偡丏

仭掅強偱偺榬嶌嬈偑壜擻側悈暯4媟2榬儌乕僪
慜媟2杮傪榬偲偟偰梡偄丆巆傝偺4杮偼偦偺傑傑媟偲偟偰梡偄傑偡丏
摲懱傪抧柺偲暯峴偵偟偨忬懺偱丆4媟偱摲懱傪埨掕偵巟偊丆慜曽偺2榬偱掅強偱偺儅僯僺儏儗乕僔儑儞傪峴偄傑偡丏

仭崅強偱偺榬嶌嬈偑壜擻側悅捈4媟2榬儌乕僪
屻媟2杮傪榬偲偟偰梡偄丆巆傝偺4杮偼偦偺傑傑媟偲偟偰梡偄傑偡丏
懠偺2偮偺儌乕僪偲偼堎側傝摲懱傪抧柺偵悅捈偵偟偨忬懺偱丆壓晹偺4媟偱摲懱傪巟偊丆忋晹偺2榬偱悈暯儌乕僪傛傝傕崅強偱偺儅僯僺儏儗乕僔儑儞傪峴偄傑偡丏
仭摦夋