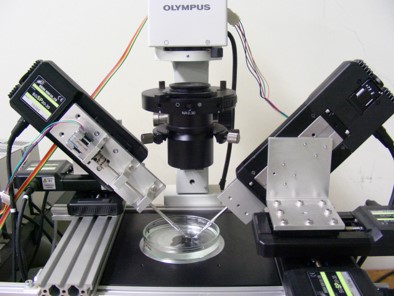
マイクロマニピュレーションシステム
バイオ分野や細胞工学における進展に伴い,個々の細胞,さらには1個の細胞の局所的な性質を解析する必要性から,顕微鏡下で,細胞の位置姿勢を多自由度かつ迅速・正確に制御できる技術が求められています. 本研究では,2本のマイクロフィンガーで,接触・非接触に細胞などの微小物体を操作するシステムを開発しています.
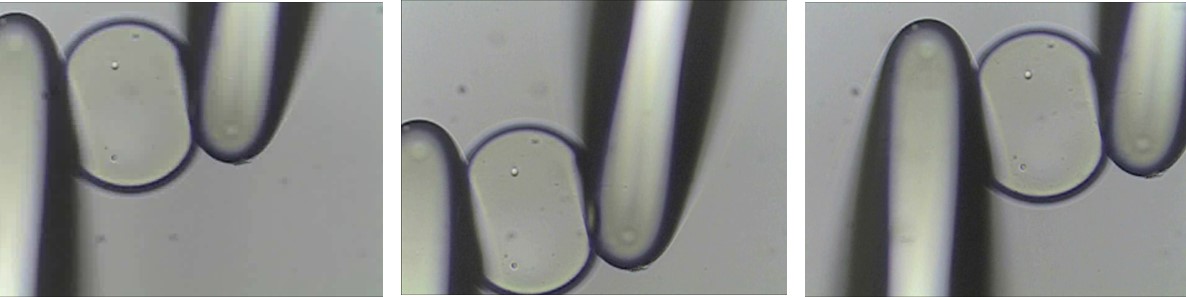
■接触式マニピュレーション
2本のガラス棒で物体を把持し,3次元的に移動させたり回転させたりすることができます.
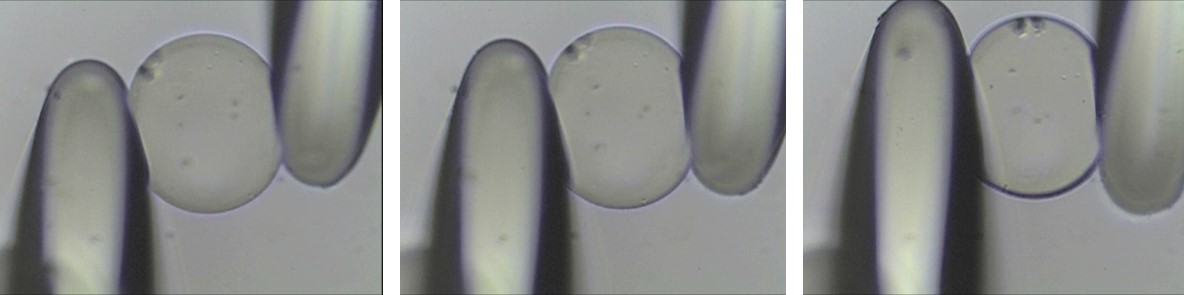
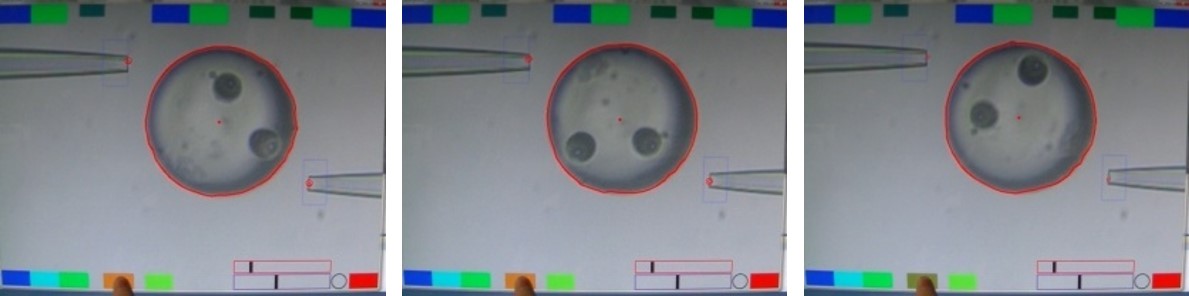
■非接触式マニピュレーション
2本のガラスマイクロピペットから水を噴射して物体に力を加え,物体を移動させたり回転させたりすることができます.
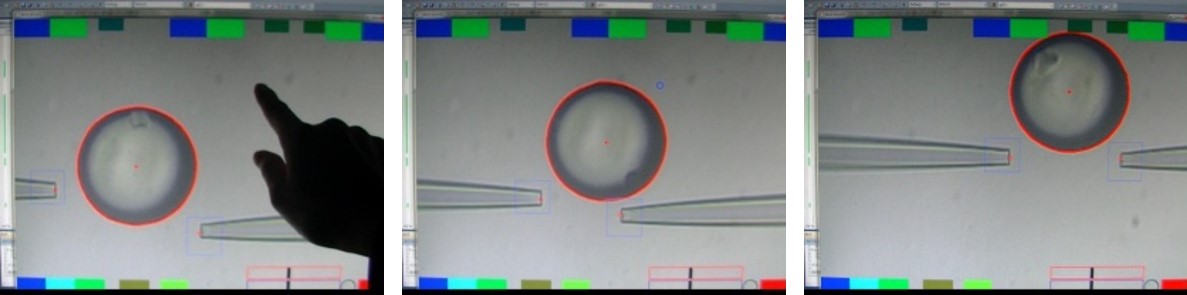
■動画