研究紹介
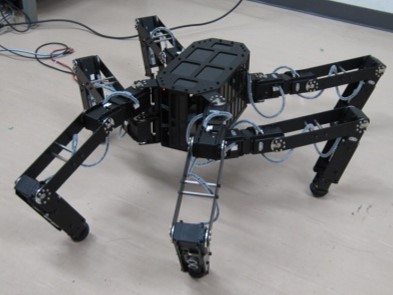 |
6脚作業移動ロボット6本の脚を持ち,3つのモードを切り替えることで高い移動能力と作業能力を発揮する作業移動ロボットの研究です. |
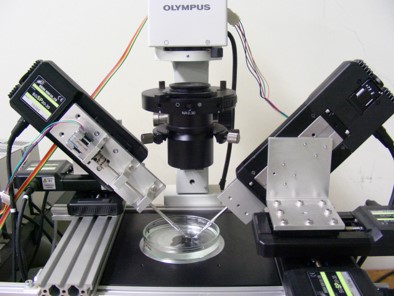 |
マイクロマニピュレーションシステムバイオ分野で求められる細胞操作を多自由度・高速・正確に行うマイクロマニピュレーションシステムの研究です. |
 |
上肢アシストロボット腕の不自由な人の食事などの卓上作業をアシストするロボットの研究です. |
|
6脚作業移動ロボット6本の脚を持ち,3つのモードを切り替えることで高い移動能力と作業能力を発揮する作業移動ロボットの研究です. |
|
マイクロマニピュレーションシステムバイオ分野で求められる細胞操作を多自由度・高速・正確に行うマイクロマニピュレーションシステムの研究です. |
|
上肢アシストロボット腕の不自由な人の食事などの卓上作業をアシストするロボットの研究です. |